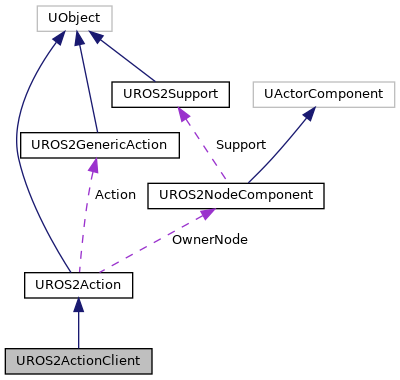
Class implementing ROS2 action clients. Wrapper class of rclc action client. Callbacks are set through the SetDelegates. More...
#include <ROS2ActionClient.h>
Public Member Functions | |
| virtual void | Destroy () override |
| Destroy action client from rclc. More... | |
| virtual void | ProcessReady (rcl_wait_set_t *wait_set) override |
| Determine the relevant action client functions to call. More... | |
| bool | SendGoal () |
| Send action goal with rcl_action_send_goal_request. More... | |
| template<typename TAction , typename TUEStruct > | |
| void | SendGoal (const TUEStruct &InGoalData) |
| Send a goal. More... | |
| void | SendResultRequest () |
| Send result request to get result with rcl_action_send_result_request. More... | |
| void | SendCancelRequest () |
| Send cancel request with rcl_action_send_cancel_request. More... | |
| void | SetDelegates (const FActionCallback &InFeedbackDelegate, const FActionCallback &InResultResponseDelegate, const FActionCallback &InGoalResponseDelegate, const FSimpleCallback &InCancelResponseDelegate) |
| Set the Delegates. More... | |
 Public Member Functions inherited from UROS2Action Public Member Functions inherited from UROS2Action | |
| virtual bool | InitializeWithROS2 (UROS2NodeComponent *InROS2Node) |
| Initialize action. More... | |
| virtual bool | Init () |
| Initialize action and action component. More... | |
| virtual bool | InitializeAction () |
| Create and Initize action. More... | |
Static Public Member Functions | |
| static UROS2ActionClient * | CreateActionClient (UObject *InOwner, const FString &InActionName, const TSubclassOf< UROS2GenericAction > &InActionClass, const FActionCallback &InGoalResponseDelegate, const FActionCallback &InResultResponseDelegate, const FActionCallback &InFeedbackDelegate, const FSimpleCallback &InCancelResponseDelegate, const UROS2QoS InGoalQoS=UROS2QoS::Services, const UROS2QoS InResultQoS=UROS2QoS::Services, const UROS2QoS InFeedbackQoS=UROS2QoS::Default, const UROS2QoS InCancelQoS=UROS2QoS::Services) |
| Create Action Client. More... | |
Public Attributes | |
| rcl_action_client_t | client |
| ROS2 action client from rclc. | |
| Public Attributes inherited from UROS2Action | |
| FString | ActionName |
| TSubclassOf< UROS2GenericAction > | ActionClass |
| type of action More... | |
| UROS2GenericAction * | Action |
| ROS2 Action Instance. More... | |
| UROS2NodeComponent * | OwnerNode |
| ROS2Node which own this action. More... | |
| TEnumAsByte< UROS2State > | State = UROS2State::Created |
| Action state. More... | |
| UROS2QoS | CancelQoS = UROS2QoS::Services |
| Quality of Cancel. More... | |
| UROS2QoS | GoalQoS = UROS2QoS::Services |
| Quality of Goal. More... | |
| UROS2QoS | ResultQoS = UROS2QoS::Services |
| Quality of Result. More... | |
| UROS2QoS | FeedbackQoS = UROS2QoS::Default |
| Quality of Feedback. More... | |
Private Member Functions | |
| virtual void | InitializeActionComponent () override |
| Initialize ROS2 action client with rcl_action_client_init. More... | |
Additional Inherited Members |
Detailed Description
Class implementing ROS2 action clients. Wrapper class of rclc action client. Callbacks are set through the SetDelegates.
method
UCLASS(ClassGroup = (Custom), Blueprintable, BlueprintType, meta = (BlueprintSpawnableComponent))
Member Function Documentation
◆ CreateActionClient()
|
static |
Create Action Client.
- Parameters
-
InOwner InActionName InActionClass InFeedbackDelegate InResultResponseDelegate InGoalResponseDelegate InCancelResponseDelegate
- Returns
- UROS2ActionClient*
◆ Destroy()
|
overridevirtual |
Destroy action client from rclc.
Reimplemented from UROS2Action.
◆ InitializeActionComponent()
|
overrideprivatevirtual |
Initialize ROS2 action client with rcl_action_client_init.
Set QOS for all goal, result, cancel, feedback and status
Reimplemented from UROS2Action.
◆ ProcessReady()
|
overridevirtual |
Determine the relevant action client functions to call.
- Parameters
-
wait_set
Reimplemented from UROS2Action.
◆ SendCancelRequest()
| void UROS2ActionClient::SendCancelRequest | ( | ) |
Send cancel request with rcl_action_send_cancel_request.
◆ SendGoal() [1/2]
| bool UROS2ActionClient::SendGoal | ( | ) |
Send action goal with rcl_action_send_goal_request.
◆ SendGoal() [2/2]
|
inline |
Send a goal.
- Template Parameters
-
TUEStruct
- Parameters
-
InGoalData
◆ SendResultRequest()
| void UROS2ActionClient::SendResultRequest | ( | ) |
Send result request to get result with rcl_action_send_result_request.
◆ SetDelegates()
| void UROS2ActionClient::SetDelegates | ( | const FActionCallback & | InFeedbackDelegate, |
| const FActionCallback & | InResultResponseDelegate, | ||
| const FActionCallback & | InGoalResponseDelegate, | ||
| const FSimpleCallback & | InCancelResponseDelegate | ||
| ) |
Set the Delegates.
- Parameters
-
SetGoal Feedback Result GoalResponse Cancel
The documentation for this class was generated from the following file:
- /home/docs/checkouts/readthedocs.org/user_builds/rclue/checkouts/devel/Source/rclUE/Public/ROS2ActionClient.h
