ROS2 Action server Component. Wrapper of UROS2ActionServer for BP. More...
#include <ROS2ActionServer.h>
Inheritance diagram for UROS2ActionServerComponent:
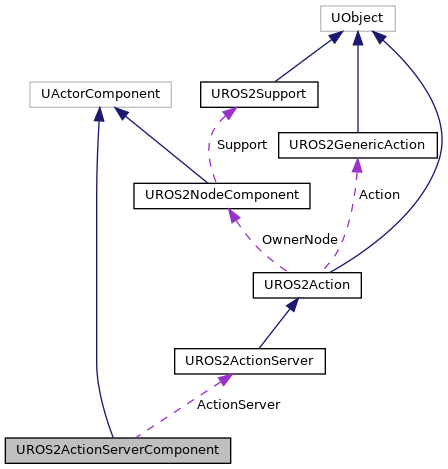
Collaboration diagram for UROS2ActionServerComponent:
Public Attributes | |
| UROS2ActionServer * | ActionServer = nullptr |
| FString | ActionName = TEXT("") |
| this is pass to UROS2ActionServer::ActionName in #BeginPlay More... | |
| TSubclassOf< UROS2GenericAction > | ActionClass |
| this is pass to UROS2ActionServer::ActionClass in #BeginPlay More... | |
| UROS2QoS | CancelQoS = UROS2QoS::Services |
| this is pass to UROS2ActionServer::CancelQoS in #BeginPlay More... | |
| UROS2QoS | GoalQoS = UROS2QoS::Services |
| this is pass to UROS2ActionServer::GoalQoS in #BeginPlay More... | |
| UROS2QoS | ResultQoS = UROS2QoS::Services |
| this is pass to UROS2ActionServer::ResultQoS in #BeginPlay More... | |
| UROS2QoS | FeedbackQoS = UROS2QoS::Default |
| this is pass to UROS2ActionServer::FeedbackQoS in #BeginPlay More... | |
Detailed Description
ROS2 Action server Component. Wrapper of UROS2ActionServer for BP.
UCLASS(Blueprintable, BlueprintType, ClassGroup = (Custom), meta = (BlueprintSpawnableComponent))
Member Data Documentation
◆ ActionClass
| TSubclassOf<UROS2GenericAction> UROS2ActionServerComponent::ActionClass |
this is pass to UROS2ActionServer::ActionClass in #BeginPlay
◆ ActionName
| FString UROS2ActionServerComponent::ActionName = TEXT("") |
this is pass to UROS2ActionServer::ActionName in #BeginPlay
◆ ActionServer
| UROS2ActionServer* UROS2ActionServerComponent::ActionServer = nullptr |
◆ CancelQoS
| UROS2QoS UROS2ActionServerComponent::CancelQoS = UROS2QoS::Services |
this is pass to UROS2ActionServer::CancelQoS in #BeginPlay
◆ FeedbackQoS
| UROS2QoS UROS2ActionServerComponent::FeedbackQoS = UROS2QoS::Default |
this is pass to UROS2ActionServer::FeedbackQoS in #BeginPlay
◆ GoalQoS
| UROS2QoS UROS2ActionServerComponent::GoalQoS = UROS2QoS::Services |
this is pass to UROS2ActionServer::GoalQoS in #BeginPlay
◆ ResultQoS
| UROS2QoS UROS2ActionServerComponent::ResultQoS = UROS2QoS::Services |
this is pass to UROS2ActionServer::ResultQoS in #BeginPlay
The documentation for this class was generated from the following file:
- /home/docs/checkouts/readthedocs.org/user_builds/rclue/checkouts/devel/Source/rclUE/Public/ROS2ActionServer.h
