Class implementing ROS2 service server. More...
#include <ROS2ServiceServer.h>
Inheritance diagram for UROS2ServiceServer:
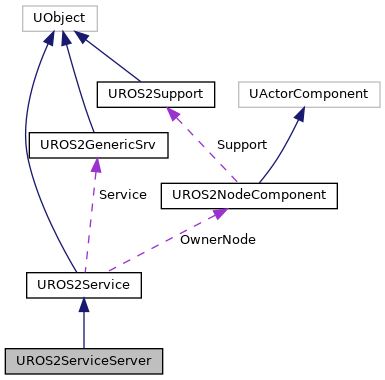
Collaboration diagram for UROS2ServiceServer:
Public Member Functions | |
| virtual void | Destroy () |
| Destroy publisher with rcl_client_fini. More... | |
| virtual void | ProcessReady () override |
| Determine the relevant action client functions to call. More... | |
| void | SetDelegates (const FServiceCallback &InSrvCallback) |
| Set SrvCallback. More... | |
 Public Member Functions inherited from UROS2Service Public Member Functions inherited from UROS2Service | |
| virtual bool | InitializeWithROS2 (UROS2NodeComponent *InROS2Node) |
| Initialize Service with ROS2Node. More... | |
| virtual bool | Init () |
| Initialize ROS2 service client with rcl_client_init, set QoS, InitializeService and InitializeServiceComponent . More... | |
| virtual bool | InitializeService () |
| Create Service instance and initialize it. More... | |
Static Public Member Functions | |
| static UROS2ServiceServer * | CreateServiceServer (UObject *InOwner, const FString &InServiceName, const TSubclassOf< UROS2GenericSrv > &InSrvClass, const FServiceCallback &InCallback, const UROS2QoS InQoS=UROS2QoS::Services) |
| Create a new UROS2ServiceServer of custom type. More... | |
Public Attributes | |
| FServiceCallback | SrvCallback |
| used to receive the answer More... | |
| rcl_service_t | rcl_service |
| ROS2 Service server. | |
| bool | Ready |
| Service is ready or not. | |
| Public Attributes inherited from UROS2Service | |
| FString | ServiceName |
| this information is redundant with Topic, but it's used to initialize it More... | |
| TSubclassOf< UROS2GenericSrv > | SrvClass |
| type of Srv class More... | |
| UROS2NodeComponent * | OwnerNode |
| ROS2Node which own this service client. More... | |
| TEnumAsByte< UROS2State > | State = UROS2State::Created |
| Service client state. More... | |
| UROS2GenericSrv * | Service |
| Service Instance. More... | |
| UROS2QoS | QoS = UROS2QoS::Services |
| Quality of service. More... | |
Protected Member Functions | |
| virtual void | InitializeServiceComponent () override |
| Initialize ROS2 service server with rcl_service_init. More... | |
Additional Inherited Members | |
| Protected Attributes inherited from UROS2Service | |
| bool | Ready |
| Service is ready or not. | |
Detailed Description
Class implementing ROS2 service server.
Service type is defined by SrvClass
UCLASS(ClassGroup = (Custom), Blueprintable, BlueprintType, meta = (BlueprintSpawnableComponent))
Member Function Documentation
◆ CreateServiceServer()
|
static |
Create a new UROS2ServiceServer of custom type.
- Parameters
-
InTopicName Topic name InSrvClass Custom message type class InCallback Callback function
◆ Destroy()
|
virtual |
Destroy publisher with rcl_client_fini.
Reimplemented from UROS2Service.
◆ InitializeServiceComponent()
|
overrideprotectedvirtual |
Initialize ROS2 service server with rcl_service_init.
Set QOS for all goal, result, cancel, feedback and status
Reimplemented from UROS2Service.
◆ ProcessReady()
|
overridevirtual |
Determine the relevant action client functions to call.
Reimplemented from UROS2Service.
◆ SetDelegates()
| void UROS2ServiceServer::SetDelegates | ( | const FServiceCallback & | InSrvCallback | ) |
Member Data Documentation
◆ SrvCallback
| FServiceCallback UROS2ServiceServer::SrvCallback |
used to receive the answer
The documentation for this class was generated from the following file:
- /home/docs/checkouts/readthedocs.org/user_builds/rclue/checkouts/devel/Source/rclUE/Public/ROS2ServiceServer.h
