rclUE Design
Unreal Architecture
One of the core features of Unreal Engine is the ability to create new objects and expose properties and functions to the editor by way of panel integration (i.e. for changing data properties) or Blueprint, for scripting logic.
Unreal’s type system favors inheritance over composition, and requires that (ultimately) all classes that work with these features derive from a base UObject class. These UObjects are managed by memory, similar to Java objects, and Unreal has a built-in garbage collector to service them.
To further empower the system, data structures such as arrays, maps, and many functionalities which exist inside the C++ STL have a custom implementation to also support such serialization. While it is possible to use STL, the preference in Unreal is to use the built-in equivalent functionality.
Previous works for UE4-ROS integration
ROSIntegration is a UE4’s plugin to enable communication between ROS1 and UE4 through rosbridge. CARLA , a simulator for autonomous driving research, is based on a fork of UE4 and has its own ROS bridge to enable communication between ROS (including ROS2) and itself.
AirSim is a simulation software designed for drones and wheeled vehicles, and integrates with ROS through a wrapper composed of 2 nodes: one for the C++ multirotor client library and one for the PD position controller.
Both CARLA Sim and AirSim take advantage of Unreal Engine’s rendering capabilities to perform machine learning tasks related to autonomous driving.
In contrast to the integrations done in AirSim and CARLA, rclUE is designed to be simple and portable. For this, we implement the required ROS2 functionalities in a UE plugin (similarly to ROSIntegration), so that it can be easily included in different UE projects and is therefore more accessible for the community.
Additionally, our tool integrates with UE’s architecture, mapping ROS2 elements to UE types (e.g. Nodes as Actors, Publishers as ActorComponents) and the editing of parameters from UE’s interface and extension through Blueprint visual scripting language.
It is our hope that the rclUE plugin will also allow non-ROS developers to leverage ROS2 software in UE with minimal effort, thus inviting contributions from specialists outside of robotics fields.
rclUE Architecture
Because of Unreal’s opinionated architecture, a clean implementation must follow the general practices of the engine, and cannot itself bring design opinions. Therefore it makes sense to choose a ROS2 client library written in C (rcl, rclc), rather than C++ (rclcpp). In particular, rclcpp is built on fundamentals of inheritance which can directly conflict with UE4’s version of inheritance necessary to work with serialization and garbage collection.
The picture below shows how our rclUE layer fits in the overall architecture.
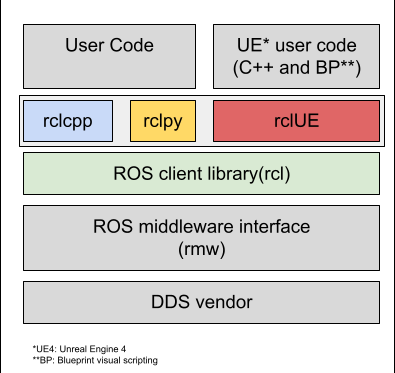
Hereafter we discuss some implementation details for ROS2 nodes, publishers and subscribers, with other components (services, actions) following the same principles.
ROS2 Node
ROS2Node is implemented as UE ActorComponent, the base class for objects that can be attached to the UE Actor such as Robot. The ROS2Node tracks and manages publishers, subscribers, service clients and servers, action clients and servers (and thus contains a simplified equivalent of rclcpp’s executor).
ROS2 Publisher(Service/Action Client)
ROS2Publisher is implemented as an UObject, the base class for all UE objects. Publisher is handled by ROS2Node and associated with Actor via ROS2Node. There is a ActorComponent implementation as well for easy integration with BP.
ROS2 Subscriber(Service/Action Server)
ROS2Subscriber is implemented as UObject and user defined function is bound to a callback method through a UE delegate. There is a ActorComponent implementation as well for easy integration with BP.