Overview of a group of rclUE software
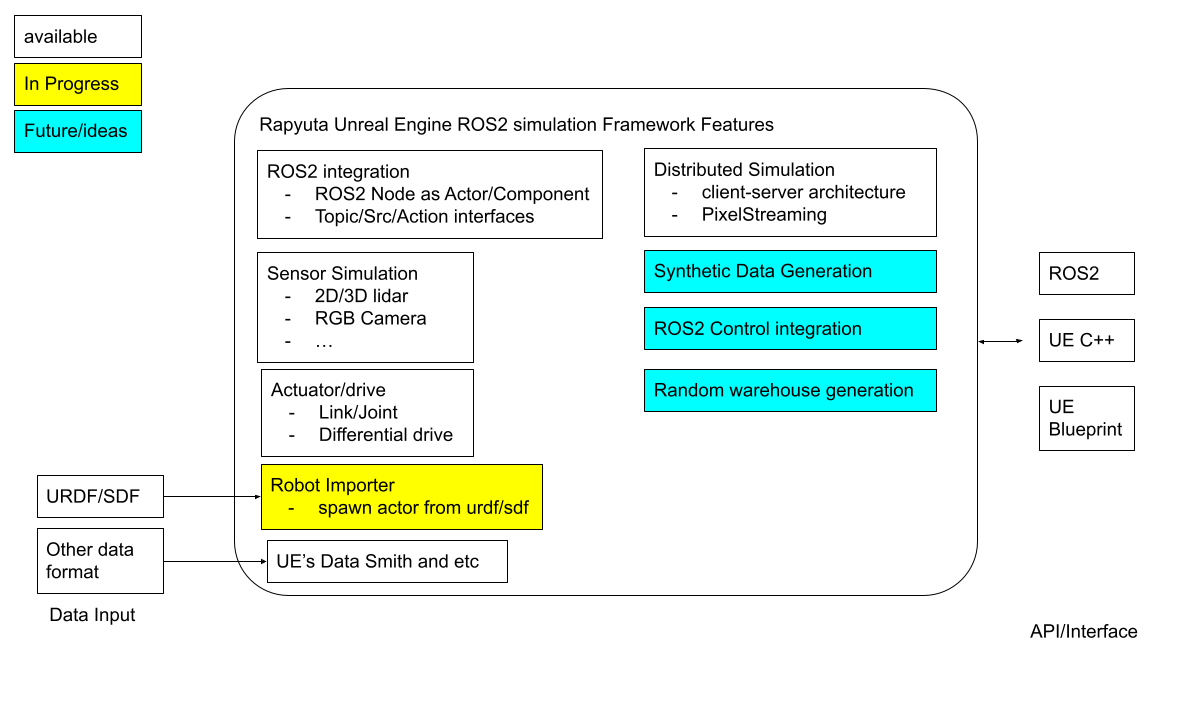
Features
Repositories
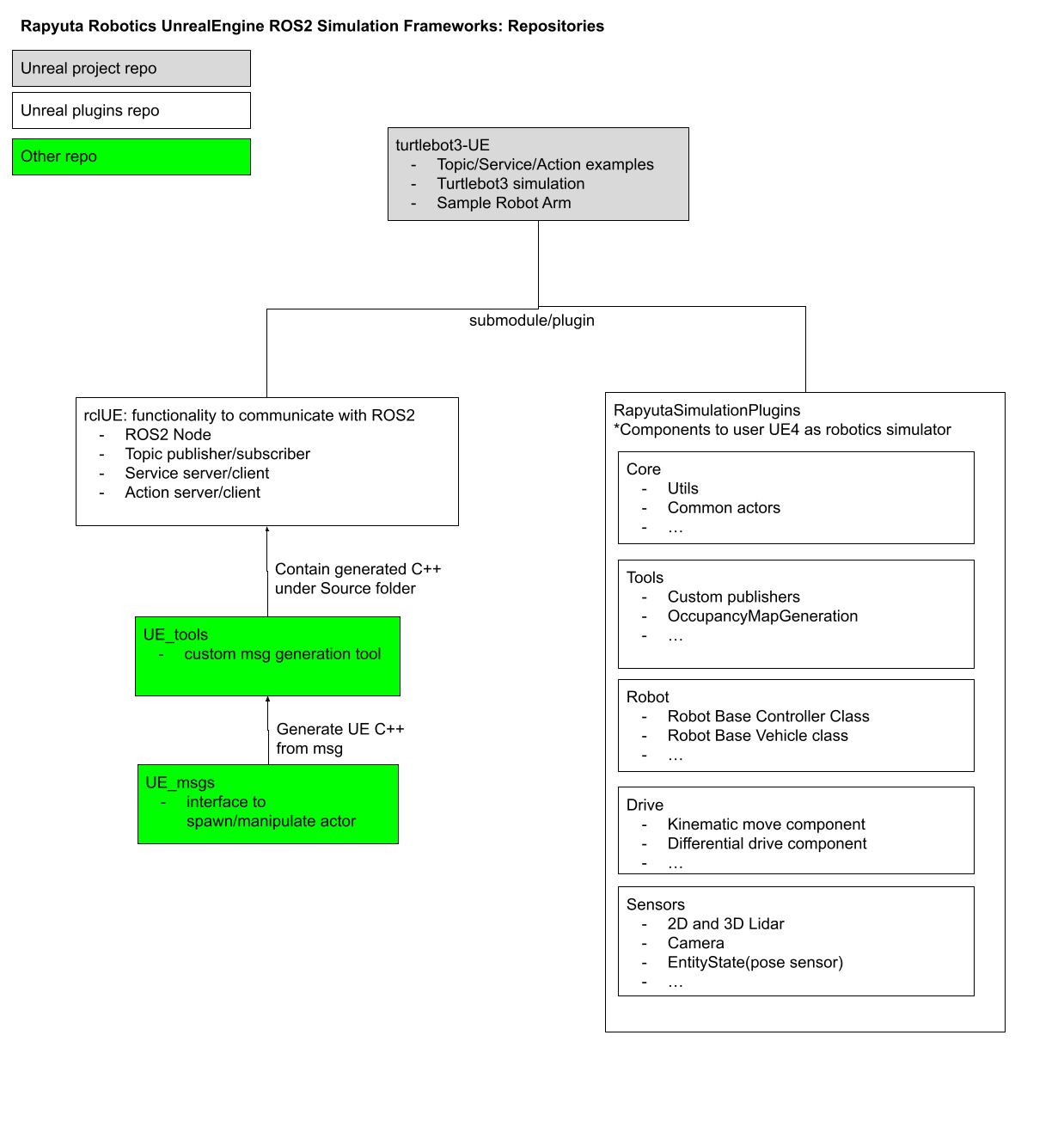
Above figure shows overview of related repositories. Please reference this structure when you create your own ROS2 UE simulations.
turtlebot3-UE
Basic example repository of ROS2 UE simulation.
rclUE(this repository)
ROS2 integration features such as creating ROS2 Node, publisher/subscriber and etc.
RapyutaSimulationPlugins
Provides feature to create ROS2 controllable actor, e.g. robot and sensors. Most of the features in top figure are provided by this repository. Please check overview of RapyutaSimulationPlugins
UE_tools
Provides non UE plugin tools such as custom msg generation for UE. Please follow README to add new msgs to rclUE.
* *Please check [CustomMsgExample](https://github.com/yuokamoto/rclUE-Examples/blob/custom_msg_example/Plugins/CustomMsgExample/README.md) as a example of custom msg in different plugin then rclUE.
UE_msgs
Includes ROS2 msg/srv/action files. Please use UE_tools to generate necessary C++ files for UE plugins.
Other example repositories
rclUE-Examples
Complicated example repository of ROS2 UE simulation including warehouse, human character, etc.
rclUE_client_example
ROS2 Client example repository to control rclUE-Example project.