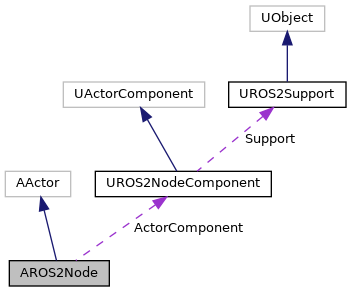
Wrapper Actor implementation of UROS2NodeComponent. More...
#include <ROS2Node.h>
Public Member Functions | |
| AROS2Node () | |
| A constructor. | |
| rcl_node_t * | GetNode () |
| Initilize rosnode with rclc_node_init_default. More... | |
| void | AddSubscription (const FString &TopicName, TSubclassOf< UROS2GenericMsg > MsgClass, const FSubscriptionCallback &Callback) |
| Methods to register subscribers. More... | |
| void | AddPublisher (UROS2Publisher *InPublisher) |
| Set this node to UROS2Publisher::OwnerNode of InPublisher and add to #Publishers. More... | |
| void | AddServiceClient (UROS2ServiceClient *InClient) |
| Set this node to UROS2ServiceClient::OwnerNode and add to #Clients. More... | |
| void | AddServiceServer (const FString &ServiceName, const TSubclassOf< UROS2GenericSrv > SrvClass, const FServiceCallback &Callback) |
| Create ServiceServer with rcl_service_init and add to Services. More... | |
| void | AddActionClient (UROS2ActionClient *InActionClient) |
| Set this node to UROS2ActionClient::OwnerNode and add to #ActionClients. More... | |
| void | AddActionServer (UROS2ActionServer *InActionServer) |
| Set this node to UROS2ActionClient::OwnerNode and add to #ActionServers. More... | |
Public Attributes | |
| FString | Name = TEXT("node") |
| FString | Namespace = TEXT("") |
Detailed Description
Wrapper Actor implementation of UROS2NodeComponent.
- Deprecated:
- Use UROS2NodeComponent instead.
Member Function Documentation
◆ AddActionClient()
| void AROS2Node::AddActionClient | ( | UROS2ActionClient * | InActionClient | ) |
Set this node to UROS2ActionClient::OwnerNode and add to #ActionClients.
- Parameters
-
InActionClient
◆ AddActionServer()
| void AROS2Node::AddActionServer | ( | UROS2ActionServer * | InActionServer | ) |
Set this node to UROS2ActionClient::OwnerNode and add to #ActionServers.
- Parameters
-
InActionServer
◆ AddPublisher()
| void AROS2Node::AddPublisher | ( | UROS2Publisher * | InPublisher | ) |
Set this node to UROS2Publisher::OwnerNode of InPublisher and add to #Publishers.
- Parameters
-
InPublisher
◆ AddServiceClient()
| void AROS2Node::AddServiceClient | ( | UROS2ServiceClient * | InClient | ) |
Set this node to UROS2ServiceClient::OwnerNode and add to #Clients.
- Parameters
-
InClient
◆ AddServiceServer()
| void AROS2Node::AddServiceServer | ( | const FString & | ServiceName, |
| const TSubclassOf< UROS2GenericSrv > | SrvClass, | ||
| const FServiceCallback & | Callback | ||
| ) |
Create ServiceServer with rcl_service_init and add to Services.
- Note
- Keep original arguments, instead of take ServiceServer as arg in ROS2NodeComponent.
- Parameters
-
ServiceName SrvClass Callback
◆ AddSubscription()
| void AROS2Node::AddSubscription | ( | const FString & | TopicName, |
| TSubclassOf< UROS2GenericMsg > | MsgClass, | ||
| const FSubscriptionCallback & | Callback | ||
| ) |
Methods to register subscribers.
It is up to the user to ensure that they are only added once
- Parameters
-
TopicName MsgClass Callback
◆ GetNode()
| rcl_node_t* AROS2Node::GetNode | ( | ) |
Initilize rosnode with rclc_node_init_default.
This can't be pre-placed in AROS2Node::BeginPlay() as the order of rcl(c) instructions could be different/relevant in
each of Child classes
Member Data Documentation
◆ Name
| FString AROS2Node::Name = TEXT("node") |
◆ Namespace
| FString AROS2Node::Namespace = TEXT("") |
The documentation for this class was generated from the following file:
- /home/docs/checkouts/readthedocs.org/user_builds/rclue/checkouts/devel/Source/rclUE/Public/ROS2Node.h
