ROS2 topic class. Parent class of UROS2Publisher and UROS2Subscriber. More...
#include <ROS2Topic.h>
Public Member Functions | |
| virtual bool | InitializeWithROS2 (UROS2NodeComponent *InROS2Node) |
| Initialize Topic with ROS2Node. More... | |
| virtual bool | Init () |
| Initialize topic, InitializeMessage and InitializeTopicComponent. More... | |
| virtual bool | InitializeMessage () |
| Create TopicMessage instance and initialize it. More... | |
| virtual void | Destroy () |
| Destroy topic and TopicMessage. More... | |
Public Attributes | |
| FString | TopicName |
| this information is redundant with Topic, but it's needed to initialize it More... | |
| TSubclassOf< UROS2GenericMsg > | MsgClass |
| this information is redundant with Topic, but it's needed to initialize it More... | |
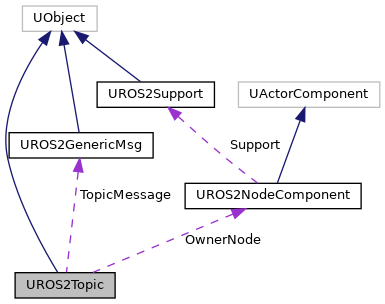
| UROS2NodeComponent * | OwnerNode = nullptr |
| ROS2Node which own this topic. More... | |
| TEnumAsByte< UROS2State > | State = UROS2State::Created |
| State. More... | |
| UROS2QoS | QoS = UROS2QoS::Default |
| Quality of service. More... | |
| TOptional< rmw_qos_profile_t > | QoSProfile |
| Optional custom QoS profile. More... | |
| UROS2GenericMsg * | TopicMessage |
| Message Instance. More... | |
Protected Member Functions | |
| rmw_qos_profile_t | GetEffectiveQoS () const |
| Get the effective QoS profile to use for this topic. More... | |
| virtual void | InitializeTopicComponent () |
| Initialize ROS2 Topic. Should be implemented in UROS2Publisher and UROS2Subscriber. More... | |
Detailed Description
ROS2 topic class. Parent class of UROS2Publisher and UROS2Subscriber.
UCLASS(ClassGroup = (Custom), Blueprintable, meta = (BlueprintSpawnableComponent))
Member Function Documentation
◆ Destroy()
|
virtual |
◆ GetEffectiveQoS()
|
inlineprotected |
Get the effective QoS profile to use for this topic.
Returns custom QoS if set, otherwise returns the QoS from QoS_LUT
- Returns
- rmw_qos_profile_t The QoS profile to use
◆ Init()
|
virtual |
Initialize topic, InitializeMessage and InitializeTopicComponent.
- Returns
- true
- false
◆ InitializeMessage()
|
virtual |
Create TopicMessage instance and initialize it.
◆ InitializeTopicComponent()
|
protectedvirtual |
Initialize ROS2 Topic. Should be implemented in UROS2Publisher and UROS2Subscriber.
Reimplemented in UROS2Publisher, and UROS2Subscriber.
◆ InitializeWithROS2()
|
virtual |
Initialize Topic with ROS2Node.
- Parameters
-
InROS2Node ROS2Node which this publisher/subscriber belongs to
Member Data Documentation
◆ MsgClass
| TSubclassOf<UROS2GenericMsg> UROS2Topic::MsgClass |
this information is redundant with Topic, but it's needed to initialize it
◆ OwnerNode
| UROS2NodeComponent* UROS2Topic::OwnerNode = nullptr |
ROS2Node which own this topic.
◆ QoS
| UROS2QoS UROS2Topic::QoS = UROS2QoS::Default |
◆ QoSProfile
| TOptional<rmw_qos_profile_t> UROS2Topic::QoSProfile |
Optional custom QoS profile.
Use this when you need fine-grained QoS settings that are not covered by the UROS2QoS
enum presets (for example, custom reliability, durability, history depth, deadline,
or lifespan values).
If this optional has a value, it takes precedence over the QoS enum above and the stored
rmw_qos_profile_t is passed directly to the underlying RMW layer. If it is not set, the
QoS enum is used to derive the effective QoS settings.
Example usage in C++:
◆ State
| TEnumAsByte<UROS2State> UROS2Topic::State = UROS2State::Created |
◆ TopicMessage
| UROS2GenericMsg* UROS2Topic::TopicMessage |
Message Instance.
◆ TopicName
| FString UROS2Topic::TopicName |
this information is redundant with Topic, but it's needed to initialize it
The documentation for this class was generated from the following file:
- /home/docs/checkouts/readthedocs.org/user_builds/rclue/checkouts/latest/Source/rclUE/Public/ROS2Topic.h
