Class implementing ROS2 node. More...
#include "Components/ActorComponent.h"#include "Containers/Map.h"#include "CoreMinimal.h"#include "GameFramework/Actor.h"#include "Actions/ROS2GenericAction.h"#include "Msgs/ROS2GenericMsg.h"#include "ROS2Support.h"#include "Srvs/ROS2GenericSrv.h"#include "ROS2NodeComponent.generated.h"
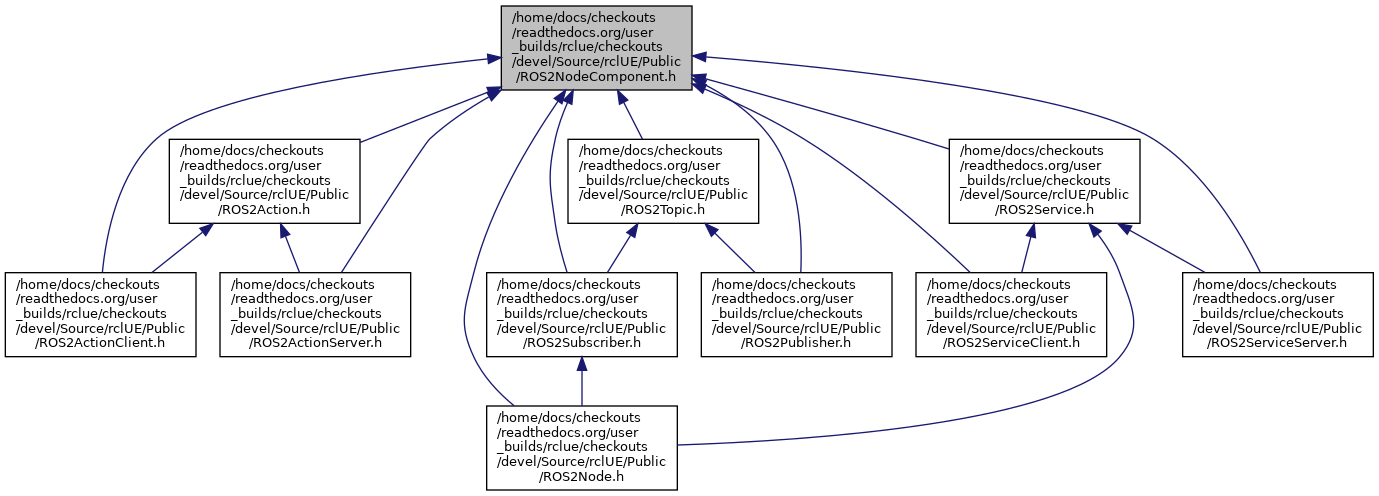
Go to the source code of this file.
Classes | |
| class | UROS2NodeComponent |
| Class implementing ROS2 node. More... | |
Macros | |
| #define | ROS2_CREATE_LOOP_PUBLISHER( InROS2Node, InUserObject, InTopicName, InPublisherClass, InMsgClass, InPubFrequency, InCallback, OutPublisher) |
| Create #FTopicCallback and call UROS2NodeComponent::CreateLoopPublisher. More... | |
| #define | ROS2_CREATE_LOOP_PUBLISHER_WITH_QOS( InROS2Node, InUserObject, InTopicName, InPublisherClass, InMsgClass, InPubFrequency, InCallback, InQoS, OutPublisher) |
| Create #FTopicCallback and call UROS2NodeComponent::CreateLoopPublisher. More... | |
| #define | ROS2_CREATE_SUBSCRIBER(InROS2Node, InUserObject, InTopicName, InMsgClass, InCallback) |
| Create #FsSubscriptionCallback and call UROS2NodeComponent::CreateSubscriber. More... | |
| #define | ROS2_CREATE_SUBSCRIBERW_WITH_QOS(InROS2Node, InUserObject, InTopicName, InMsgClass, InCallback, InQoS) |
| Create #FsSubscriptionCallback and call #UROS2NodeComponent::CreateSubscriberWithQoS. More... | |
| #define | ROS2_CREATE_SERVICE_CLIENT(InROS2Node, InUserObject, InServiceName, InSrvClass, InRequestCallback, OutClient) |
| Create #FServiceCallback and call UROS2NodeComponent::CreateServiceClient. More... | |
| #define | ROS2_CREATE_SERVICE_CLIENT_WITH_QOS( InROS2Node, InUserObject, InServiceName, InSrvClass, InRequestCallback, InQoS, OutClient) |
| Create #FServiceCallback and call UROS2NodeComponent::CreateServiceClient. More... | |
| #define | ROS2_CREATE_SERVICE_SERVER(InROS2Node, InUserObject, InServiceName, InSrvClass, InResponseCallback) |
| Create #FServiceCallback and call UROS2NodeComponent::CreateServiceServer. More... | |
| #define | ROS2_CREATE_SERVICE_SERVER_WITH_QOS(InROS2Node, InUserObject, InServiceName, InSrvClass, InQoS, InResponseCallback) |
| Create #FServiceCallback and call UROS2NodeComponent::CreateServiceServer. More... | |
| #define | ROS2_CREATE_ACTION_CLIENT(InROS2Node, InUserObject, InActionName, InActionClass, InGoalResponseDelegate, InResultResponseDelegate, InFeedbackDelegate, InCancelResponseDelegate, OutClient) |
| Create #FActionCallback and call UROS2NodeComponent::CreateActionClient. More... | |
| #define | ROS2_CREATE_ACTION_CLIENT_WITH_QOS(InROS2Node, InUserObject, InActionName, InActionClass, InGoalResponseDelegate, InResultResponseDelegate, InFeedbackDelegate, InCancelResponseDelegate, InGoalQoS, InResultQoS, InFeedbackQoS, InCancelQoS, OutClient) |
| Create #FActionCallback and call UROS2NodeComponent::CreateActionClient. More... | |
| #define | ROS2_CREATE_ACTION_SERVER( InROS2Node, InUserObject, InActionName, InActionClass, InGoalDelegate, InResultDelegate, InCancelDelegate, OutServer) |
| Create #FActionCallback and call UROS2NodeComponent::CreateActionServer. More... | |
| #define | ROS2_CREATE_ACTION_SERVER_WITH_QOS(InROS2Node, InUserObject, InActionName, InActionClass, InGoalDelegate, InResultDelegate, InCancelDelegate, InGoalQoS, InResultQoS, InFeedbackQoS, InCancelQoS, OutServer) |
| Create #FActionCallback and call UROS2NodeComponent::CreateActionServer. More... | |
| #define | IS_ROS2NODE_INITED(InNode, InName, OutRes) |
| Check UROS2NodeComponent is initialized or not. More... | |
Functions | |
| DECLARE_DYNAMIC_DELEGATE_OneParam (FSubscriptionCallback, const UROS2GenericMsg *, InMessage) | |
| BP requires a custom-made callback thus it must be Dynamic. | |
Detailed Description
Class implementing ROS2 node.
This class also handles tasks performed by the executor in rclc.
Additionally, helper structs FSubscription and FService are defined here as they are considered components of the node and not
additional distinct entities Publishers, subscribers, services, service clients, action servers and action clients should
register to the node with the appropriate methods (Add*).
- Copyright
- Copyright 2020-2022 Rapyuta Robotics Co., Ltd.
Macro Definition Documentation
◆ IS_ROS2NODE_INITED
| #define IS_ROS2NODE_INITED | ( | InNode, | |
| InName, | |||
| OutRes | |||
| ) |
Check UROS2NodeComponent is initialized or not.
- Parameters
-
InNode UROS2NodeComponent InName Node name. Used only for logging. OutRes bool result. true if initialized, false otherwise.
◆ ROS2_CREATE_ACTION_CLIENT
| #define ROS2_CREATE_ACTION_CLIENT | ( | InROS2Node, | |
| InUserObject, | |||
| InActionName, | |||
| InActionClass, | |||
| InGoalResponseDelegate, | |||
| InResultResponseDelegate, | |||
| InFeedbackDelegate, | |||
| InCancelResponseDelegate, | |||
| OutClient | |||
| ) |
Create #FActionCallback and call UROS2NodeComponent::CreateActionClient.
FActionCallback is of dynamic delegate type to be serializable for BP use
FActionCallback::BindDynamic is a macro, instead of a function.
Thus InCallback can only be a direct UFUNCTION() method & cannot be used as typed param!
- Parameters
-
InROS2Node UROS2NodeComponent InUserObject Objects of InCallback InActionName pass to UROS2NodeComponent::CreateActionClient InActionClass pass to UROS2NodeComponent::CreateActionClient InGoalResponseDelegate convert to #FActionCallback and pass to UROS2NodeComponent::CreateActionClient InResultResponseDelegate convert to #FActionCallback and pass to UROS2NodeComponent::CreateActionClient InFeedbackDelegate convert to #FActionCallback and pass to UROS2NodeComponent::CreateActionClient InCancelResponseDelegate convert to #FSimpleCallback and pass to UROS2NodeComponent::CreateActionClient OutClient return value of UROS2NodeComponent::CreateActionClient
◆ ROS2_CREATE_ACTION_CLIENT_WITH_QOS
| #define ROS2_CREATE_ACTION_CLIENT_WITH_QOS | ( | InROS2Node, | |
| InUserObject, | |||
| InActionName, | |||
| InActionClass, | |||
| InGoalResponseDelegate, | |||
| InResultResponseDelegate, | |||
| InFeedbackDelegate, | |||
| InCancelResponseDelegate, | |||
| InGoalQoS, | |||
| InResultQoS, | |||
| InFeedbackQoS, | |||
| InCancelQoS, | |||
| OutClient | |||
| ) |
Create #FActionCallback and call UROS2NodeComponent::CreateActionClient.
FActionCallback is of dynamic delegate type to be serializable for BP use
FActionCallback::BindDynamic is a macro, instead of a function.
Thus InCallback can only be a direct UFUNCTION() method & cannot be used as typed param!
- Parameters
-
InROS2Node UROS2NodeComponent InUserObject Objects of InCallback InActionName pass to UROS2NodeComponent::CreateActionClient InActionClass pass to UROS2NodeComponent::CreateActionClient InGoalResponseDelegate convert to #FActionCallback and pass to UROS2NodeComponent::CreateActionClient InResultResponseDelegate convert to #FActionCallback and pass to UROS2NodeComponent::CreateActionClient InFeedbackDelegate convert to #FActionCallback and pass to UROS2NodeComponent::CreateActionClient InCancelResponseDelegate convert to #FSimpleCallback and pass to UROS2NodeComponent::CreateActionClient InGoalQoS pass to UROS2NodeComponent::CreateActionClient InResultQoS pass to UROS2NodeComponent::CreateActionClient InFeedbackQoS pass to UROS2NodeComponent::CreateActionClient InCancelQoS pass to UROS2NodeComponent::CreateActionClient OutClient return value of UROS2NodeComponent::CreateActionClient
◆ ROS2_CREATE_ACTION_SERVER
| #define ROS2_CREATE_ACTION_SERVER | ( | InROS2Node, | |
| InUserObject, | |||
| InActionName, | |||
| InActionClass, | |||
| InGoalDelegate, | |||
| InResultDelegate, | |||
| InCancelDelegate, | |||
| OutServer | |||
| ) |
Create #FActionCallback and call UROS2NodeComponent::CreateActionServer.
FActionCallback is of dynamic delegate type to be serializable for BP use
FActionCallback::BindDynamic is a macro, instead of a function.
Thus InCallback can only be a direct UFUNCTION() method & cannot be used as typed param!
- Parameters
-
InROS2Node UROS2NodeComponent InUserObject Objects of InCallback InActionName pass to UROS2NodeComponent::CreateActionServer InActionClass pass to UROS2NodeComponent::CreateActionServer InGoalDelegate convert to #FActionCallback and pass to UROS2NodeComponent::CreateActionServer InResultDelegate convert to #FSimpleCallback and pass to UROS2NodeComponent::CreateActionServer InCancelDelegate convert to #FSimpleCallback and pass to UROS2NodeComponent::CreateActionServer OutServer return value of UROS2NodeComponent::CreateActionServer
◆ ROS2_CREATE_ACTION_SERVER_WITH_QOS
| #define ROS2_CREATE_ACTION_SERVER_WITH_QOS | ( | InROS2Node, | |
| InUserObject, | |||
| InActionName, | |||
| InActionClass, | |||
| InGoalDelegate, | |||
| InResultDelegate, | |||
| InCancelDelegate, | |||
| InGoalQoS, | |||
| InResultQoS, | |||
| InFeedbackQoS, | |||
| InCancelQoS, | |||
| OutServer | |||
| ) |
Create #FActionCallback and call UROS2NodeComponent::CreateActionServer.
FActionCallback is of dynamic delegate type to be serializable for BP use
FActionCallback::BindDynamic is a macro, instead of a function.
Thus InCallback can only be a direct UFUNCTION() method & cannot be used as typed param!
- Parameters
-
InROS2Node UROS2NodeComponent InUserObject Objects of InCallback InActionName pass to UROS2NodeComponent::CreateActionServer InActionClass pass to UROS2NodeComponent::CreateActionServer InGoalDelegate convert to #FActionCallback and pass to UROS2NodeComponent::CreateActionServer InResultDelegate convert to #FSimpleCallback and pass to UROS2NodeComponent::CreateActionServer InCancelDelegate convert to #FSimpleCallback and pass to UROS2NodeComponent::CreateActionServer InGoalQoS pass to UROS2NodeComponent::CreateActionServer InResultQoS pass to UROS2NodeComponent::CreateActionServer InFeedbackQoS pass to UROS2NodeComponent::CreateActionServer InCancelQoS pass to UROS2NodeComponent::CreateActionServer OutServer return value of UROS2NodeComponent::CreateActionServer
◆ ROS2_CREATE_LOOP_PUBLISHER
| #define ROS2_CREATE_LOOP_PUBLISHER | ( | InROS2Node, | |
| InUserObject, | |||
| InTopicName, | |||
| InPublisherClass, | |||
| InMsgClass, | |||
| InPubFrequency, | |||
| InCallback, | |||
| OutPublisher | |||
| ) |
Create #FTopicCallback and call UROS2NodeComponent::CreateLoopPublisher.
FTopicCallback is of dynamic delegate type to be serializable for BP use
FTopicCallback::BindDynamic is a macro, instead of a function.
Thus InCallback can only be a direct UFUNCTION() method & cannot be used as typed param!
- Parameters
-
InROS2Node UROS2NodeComponent InUserObject Objects of InCallback InTopicName pass to UROS2NodeComponent::CreateLoopPublisher InPublisherClass pass to UROS2NodeComponent::CreateLoopPublisher InMsgClass pass to UROS2NodeComponent::CreateLoopPublisher InPubFrequency pass to UROS2NodeComponent::CreateLoopPublisher InCallback convert to #FTopicCallback and pass to UROS2NodeComponent::CreateLoopPublisher OutPublisher return value of UROS2NodeComponent::CreateLoopPublisher
◆ ROS2_CREATE_LOOP_PUBLISHER_WITH_QOS
| #define ROS2_CREATE_LOOP_PUBLISHER_WITH_QOS | ( | InROS2Node, | |
| InUserObject, | |||
| InTopicName, | |||
| InPublisherClass, | |||
| InMsgClass, | |||
| InPubFrequency, | |||
| InCallback, | |||
| InQoS, | |||
| OutPublisher | |||
| ) |
Create #FTopicCallback and call UROS2NodeComponent::CreateLoopPublisher.
FTopicCallback is of dynamic delegate type to be serializable for BP use
FTopicCallback::BindDynamic is a macro, instead of a function.
Thus InCallback can only be a direct UFUNCTION() method & cannot be used as typed param!
- Parameters
-
InROS2Node UROS2NodeComponent InUserObject Objects of InCallback InTopicName pass to UROS2NodeComponent::CreateLoopPublisher InPublisherClass pass to UROS2NodeComponent::CreateLoopPublisher InMsgClass pass to UROS2NodeComponent::CreateLoopPublisher InPubFrequency pass to UROS2NodeComponent::CreateLoopPublisher InCallback convert to #FTopicCallback and pass to UROS2NodeComponent::CreateLoopPublisher InQoS pass to UROS2NodeComponent::CreateLoopPublisher OutPublisher return value of UROS2NodeComponent::CreateLoopPublisher
◆ ROS2_CREATE_SERVICE_CLIENT
| #define ROS2_CREATE_SERVICE_CLIENT | ( | InROS2Node, | |
| InUserObject, | |||
| InServiceName, | |||
| InSrvClass, | |||
| InRequestCallback, | |||
| OutClient | |||
| ) |
Create #FServiceCallback and call UROS2NodeComponent::CreateServiceClient.
FServiceCallback is of dynamic delegate type to be serializable for BP use
FServiceCallback::BindDynamic is a macro, instead of a function.
Thus InCallback can only be a direct UFUNCTION() method & cannot be used as typed param!
- Parameters
-
InROS2Node UROS2NodeComponent InUserObject Objects of InCallback InServiceName pass to UROS2NodeComponent::CreateServiceClient InSrvClass pass to UROS2NodeComponent::CreateServiceClient InRequestCallback convert to #FServiceCallback and pass to UROS2NodeComponent::CreateServiceClient OutClient return value of UROS2NodeComponent::CreateServiceClient
◆ ROS2_CREATE_SERVICE_CLIENT_WITH_QOS
| #define ROS2_CREATE_SERVICE_CLIENT_WITH_QOS | ( | InROS2Node, | |
| InUserObject, | |||
| InServiceName, | |||
| InSrvClass, | |||
| InRequestCallback, | |||
| InQoS, | |||
| OutClient | |||
| ) |
Create #FServiceCallback and call UROS2NodeComponent::CreateServiceClient.
FServiceCallback is of dynamic delegate type to be serializable for BP use
FServiceCallback::BindDynamic is a macro, instead of a function.
Thus InCallback can only be a direct UFUNCTION() method & cannot be used as typed param!
- Parameters
-
InROS2Node UROS2NodeComponent InUserObject Objects of InCallback InServiceName pass to UROS2NodeComponent::CreateServiceClient InSrvClass pass to UROS2NodeComponent::CreateServiceClient InRequestCallback convert to #FServiceCallback and pass to UROS2NodeComponent::CreateServiceClient InQoS pass to UROS2NodeComponent::CreateServiceClient OutClient return value of UROS2NodeComponent::CreateServiceClient
◆ ROS2_CREATE_SERVICE_SERVER
| #define ROS2_CREATE_SERVICE_SERVER | ( | InROS2Node, | |
| InUserObject, | |||
| InServiceName, | |||
| InSrvClass, | |||
| InResponseCallback | |||
| ) |
Create #FServiceCallback and call UROS2NodeComponent::CreateServiceServer.
FServiceCallback is of dynamic delegate type to be serializable for BP use
FServiceCallback::BindDynamic is a macro, instead of a function.
Thus InCallback can only be a direct UFUNCTION() method & cannot be used as typed param!
- Parameters
-
InROS2Node UROS2NodeComponent InUserObject Objects of InCallback InServiceName pass to UROS2NodeComponent::CreateServiceServer InSrvClass pass to UROS2NodeComponent::CreateServiceServer InResponseCallback convert to #FServiceCallback and pass to UROS2NodeComponent::CreateServiceServer
◆ ROS2_CREATE_SERVICE_SERVER_WITH_QOS
| #define ROS2_CREATE_SERVICE_SERVER_WITH_QOS | ( | InROS2Node, | |
| InUserObject, | |||
| InServiceName, | |||
| InSrvClass, | |||
| InQoS, | |||
| InResponseCallback | |||
| ) |
Create #FServiceCallback and call UROS2NodeComponent::CreateServiceServer.
FServiceCallback is of dynamic delegate type to be serializable for BP use
FServiceCallback::BindDynamic is a macro, instead of a function.
Thus InCallback can only be a direct UFUNCTION() method & cannot be used as typed param!
- Parameters
-
InROS2Node UROS2NodeComponent InUserObject Objects of InCallback InServiceName pass to UROS2NodeComponent::CreateServiceServer InSrvClass pass to UROS2NodeComponent::CreateServiceServer InResponseCallback convert to #FServiceCallback and pass to UROS2NodeComponent::CreateServiceServer InQoS pass to UROS2NodeComponent::CreateServiceServer
◆ ROS2_CREATE_SUBSCRIBER
| #define ROS2_CREATE_SUBSCRIBER | ( | InROS2Node, | |
| InUserObject, | |||
| InTopicName, | |||
| InMsgClass, | |||
| InCallback | |||
| ) |
Create #FsSubscriptionCallback and call UROS2NodeComponent::CreateSubscriber.
FSubscriptionCallback is of dynamic delegate type to be serializable for BP use
FSubscriptionCallback::BindDynamic is a macro, instead of a function.
Thus InCallback can only be a direct UFUNCTION() method & cannot be used as typed param!
- Parameters
-
InROS2Node UROS2NodeComponent InUserObject Objects of InCallback InTopicName pass to UROS2NodeComponent::CreateSubscriber InMsgClass pass to UROS2NodeComponent::CreateSubscriber InCallback convert to #FSubscriptionCallback and pass to UROS2NodeComponent::CreateSubscriber
◆ ROS2_CREATE_SUBSCRIBERW_WITH_QOS
| #define ROS2_CREATE_SUBSCRIBERW_WITH_QOS | ( | InROS2Node, | |
| InUserObject, | |||
| InTopicName, | |||
| InMsgClass, | |||
| InCallback, | |||
| InQoS | |||
| ) |
Create #FsSubscriptionCallback and call #UROS2NodeComponent::CreateSubscriberWithQoS.
FSubscriptionCallback is of dynamic delegate type to be serializable for BP use
FSubscriptionCallback::BindDynamic is a macro, instead of a function.
Thus InCallback can only be a direct UFUNCTION() method & cannot be used as typed param!
- Parameters
-
InROS2Node UROS2NodeComponent InUserObject Objects of InCallback InTopicName pass to #UROS2NodeComponent::CreateSubscriberWithQoS InMsgClass pass to #UROS2NodeComponent::CreateSubscriberWithQoS InCallback convert to #FSubscriptionCallback and pass to UROS2NodeComponent::CreateSubscriber InQoS pass to UROS2NodeComponent::CreateSubscriber
